Field Robot Summer Course 2014
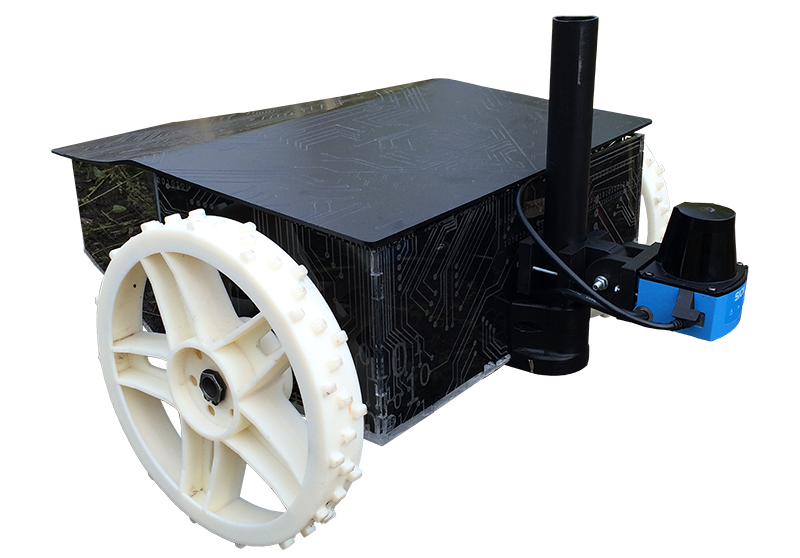
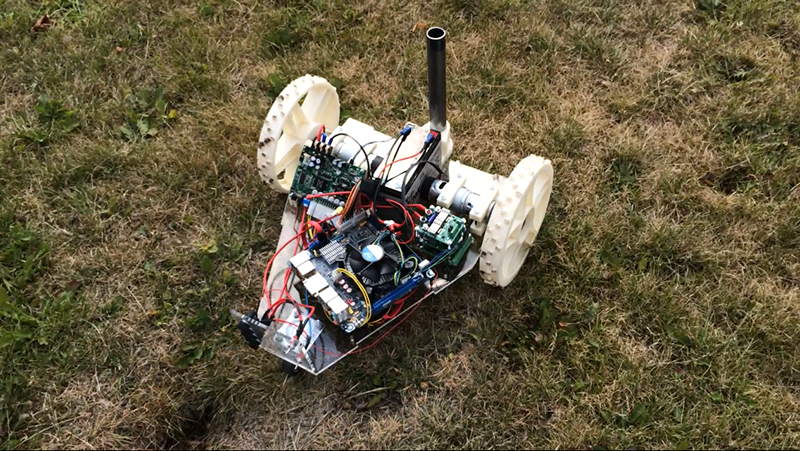
Projektet, Field Robot, går ud på at lave en robot som kan navigere af sig selv, i en majs mark. Det er et meget tidsbegrænset projekt, på kun fire uger og derfor er første prioritet at lave en robot, som kan klare ”Task 1”, hvor robotten kun skal kunne navigere imellem rækkerne. Det betyder at der konstrueres ud fra at teknikken skal kunne fungere, frem for at designe til det kommercielle marked. Som designingeniør, vil det normalt betyde at designet skal appellerer til en målgruppe, at det skal afspejle at det er en robot og at det skal være let aflæseligt, i forhold til robottens funktioner og interaktion med brugeren.
Projektleder
- Tidsplan
- Uddelegering af opgaver
- Inspirerer og opmuntrer
- Indkaldelse til ”krisemøde”
Konstruktion
- Design (sammen med Alexander)
- Design vision (Udført af Alexander)
- Form-/moodboard (Udført af Alexander)
- Idéudvælgelse
- Skitsering
- Materialevalg (sammen med Alexander)
- MMI (Udført af Alexander)
- FEM analyse
- Valg af komponenter
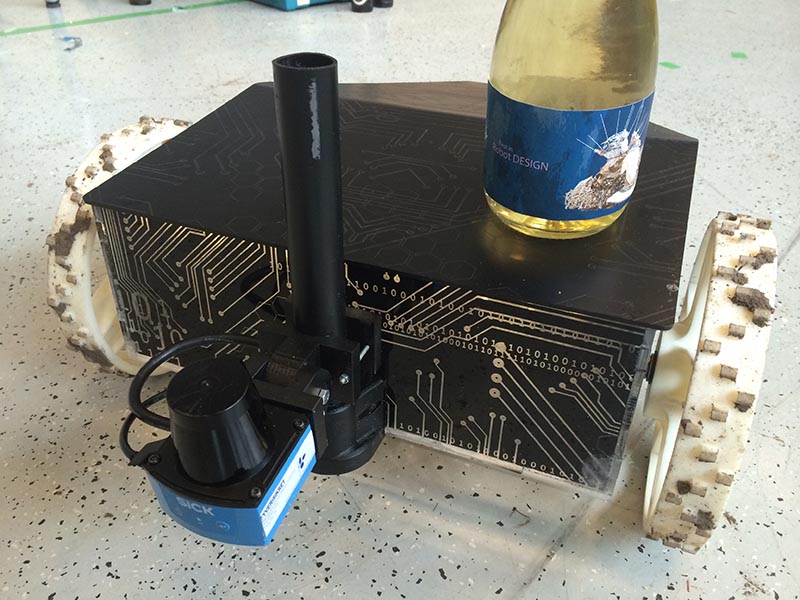
- IMU og Laser (Valgt på gruppen)
- Motor (sammen med Alexander)
- Prototyper
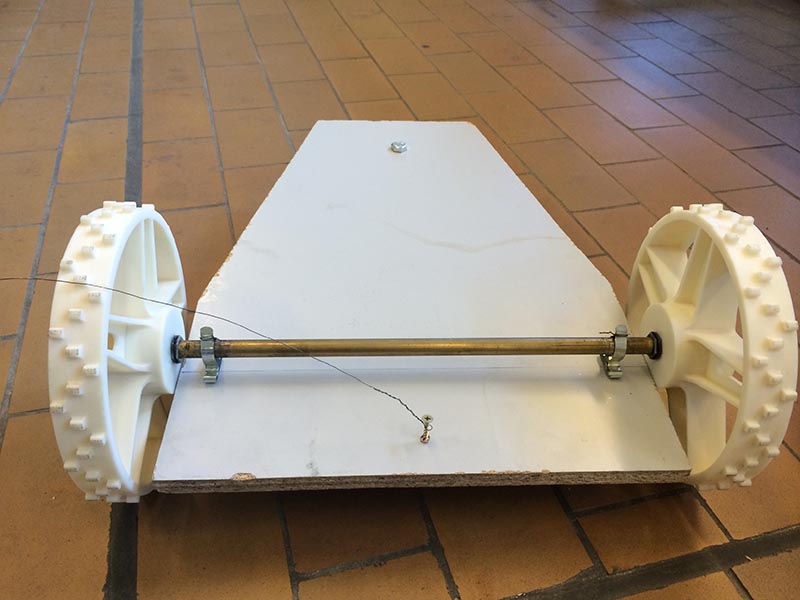
- 1. Prototype
- Udformning og størrelse
- Valg af hjul
- Placering af aksel/motor
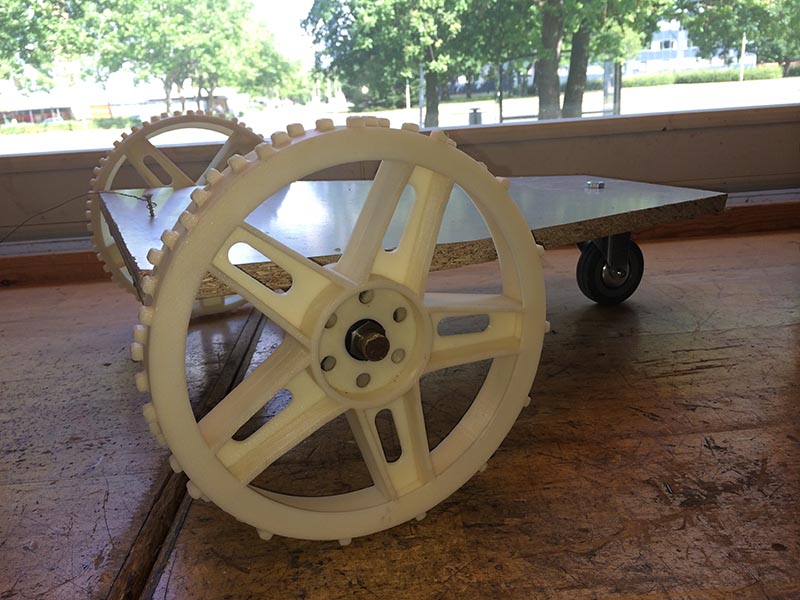
- 2. Prototype
- Terrænhåndtering
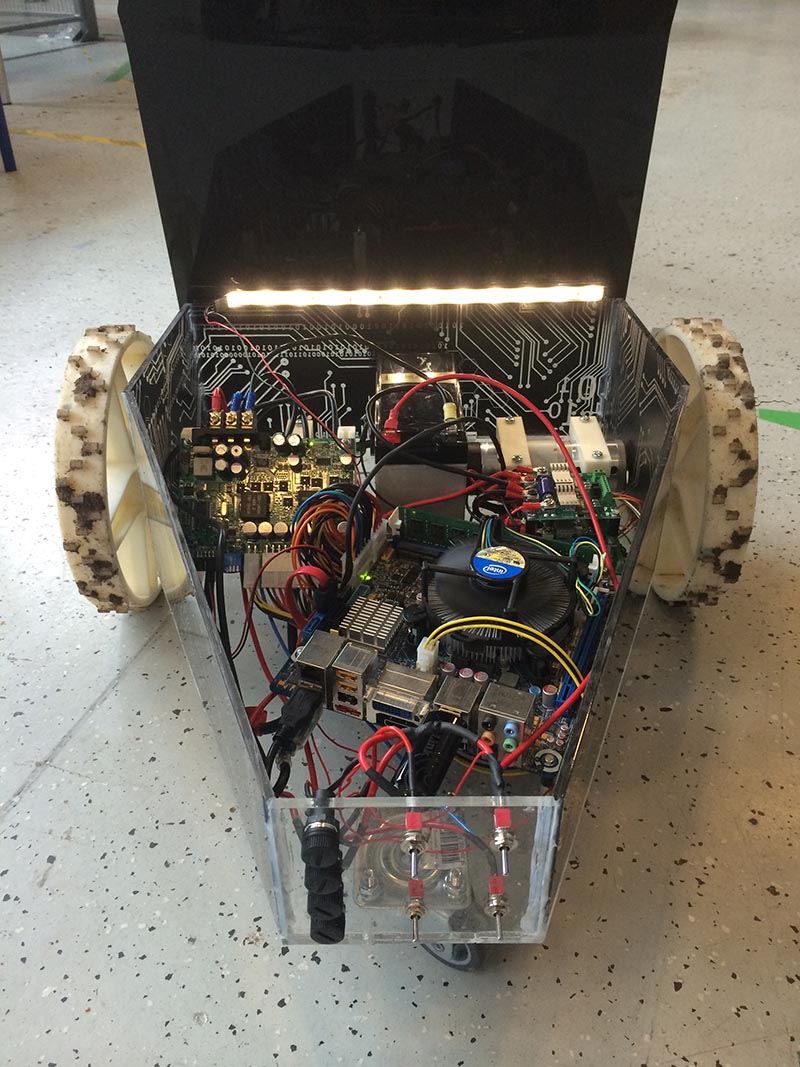
- Placering af komponenter
- Afstivning af bundplade
- 3D tegning
- 3D print
- Installation af Ubuntu og ROS på robotten
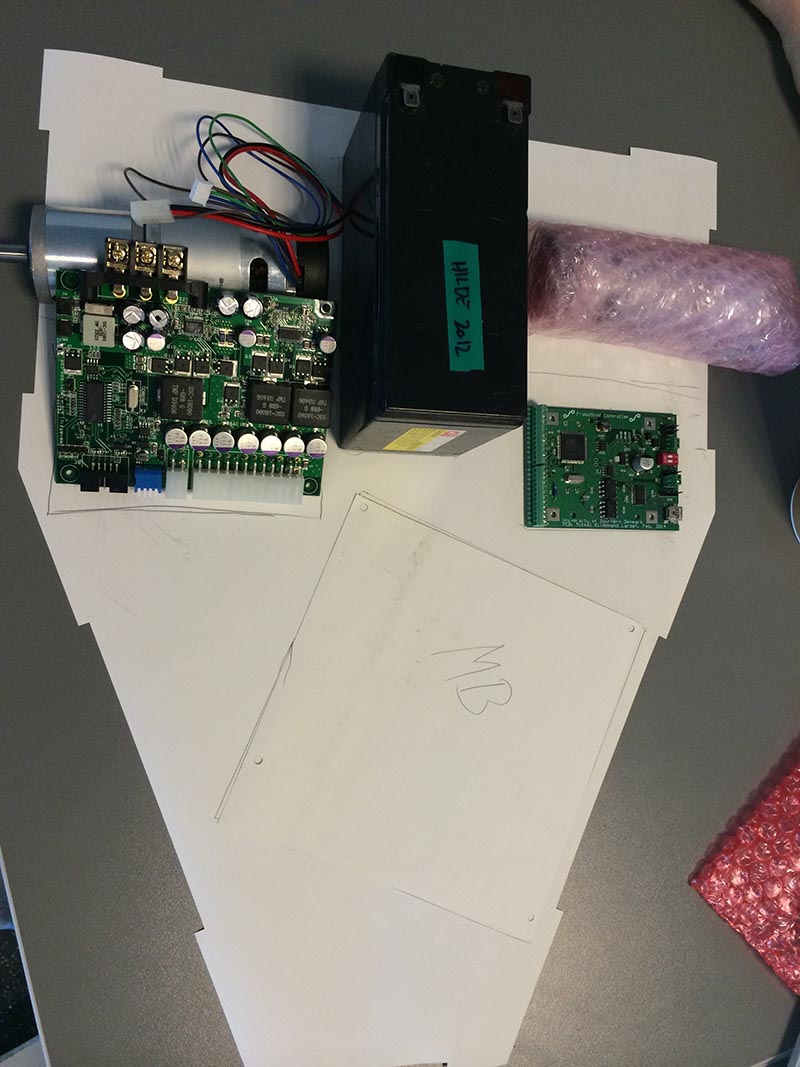
- Ledningsnet
- Forsyning fra batteri, gennem kontakter og sikringer, til komponenterne
- Direkte tilslutning fra FroboMind controller til Motherboard.
- Forbindelse mellem FroboMind controller, H-broer og motor encoder
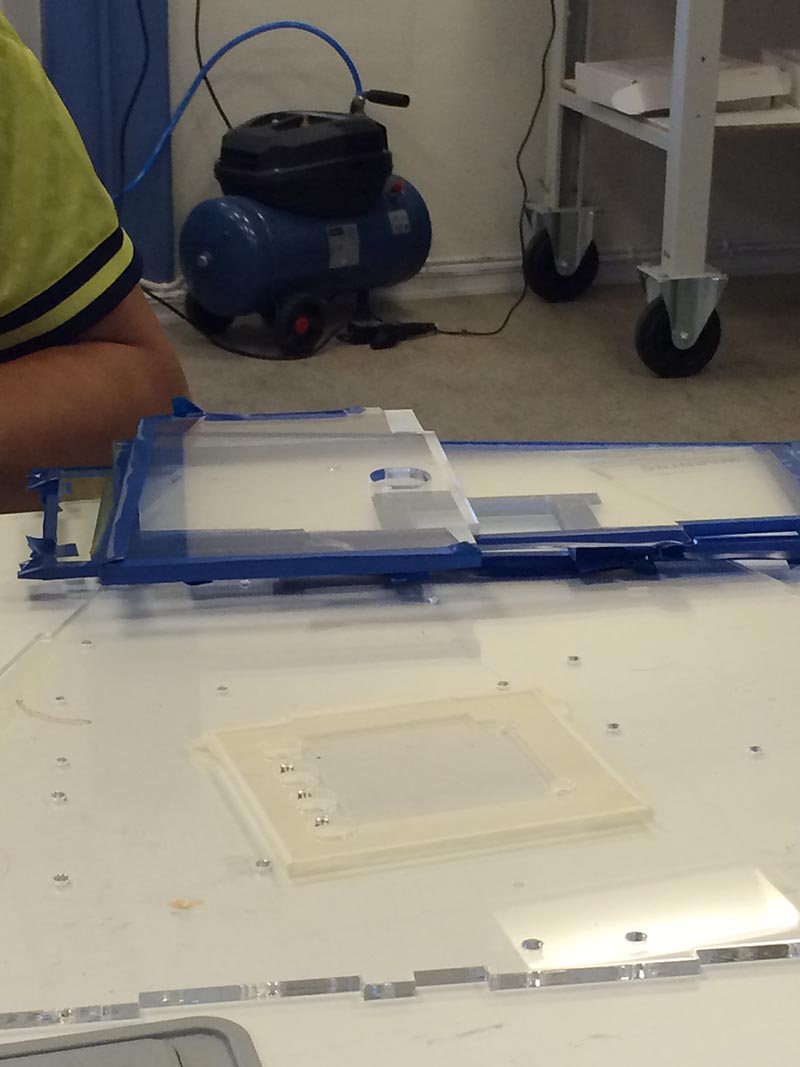
- Laserskæring (Sammen med Alexander)
- Limning (Sammen med Alexander)
- Test af limning (Udført af Alexander)
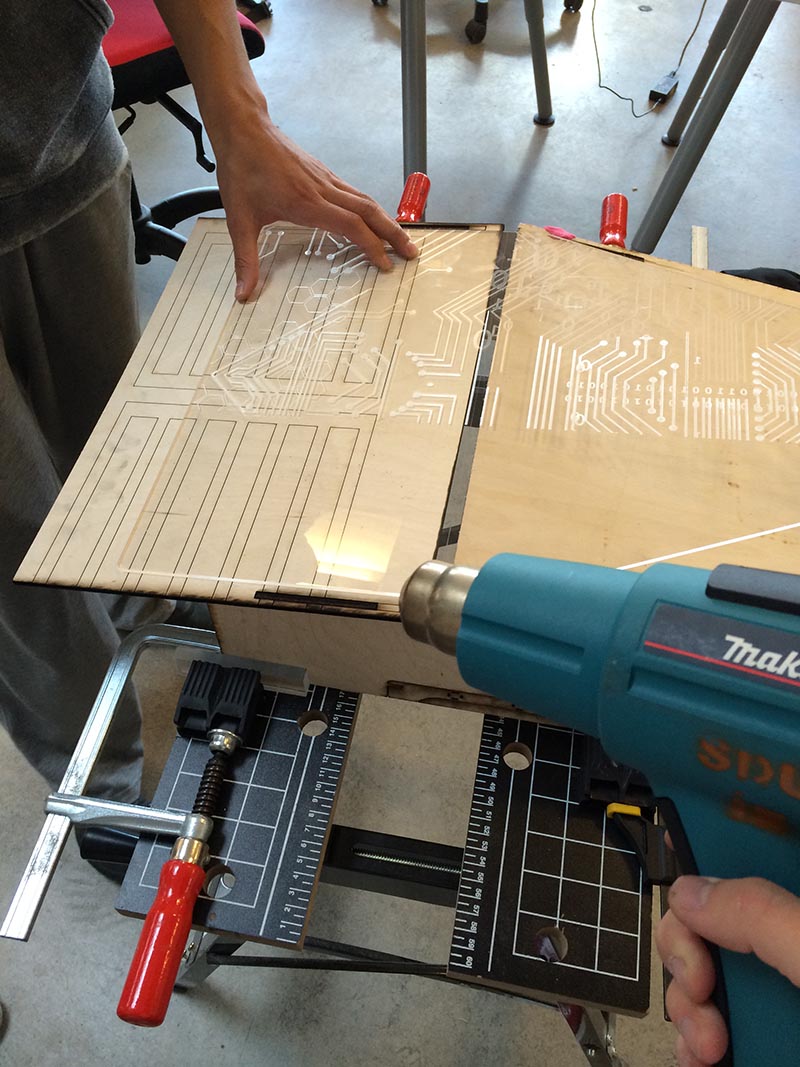
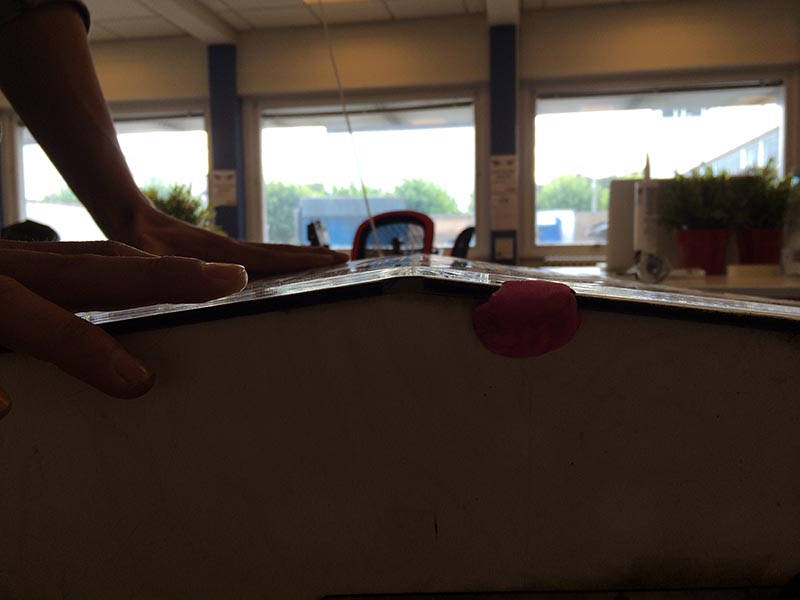
- Bukning af låg (Sammen med Alexander)
- Test af bukning (Sammen med Alexander)
- Samling af Robot (Sammen med Alexander)
- Maling af dele (Sammen med Alexander)
- Test af maling og indgravering (Udført af Alexander)
- Indgravering (Sammen med Alexander)







Dokumenter
 Download rapport
Download rapport